So, hab die letzten Tage einen kleinen Exkurs in das Stresstesten von „Micro“ Servos gemacht, konkret hier Servos in der größe des weit vebreiteten „MG90“.
Es gibt viele günstige Servos dieser Bauform bei Amazon mit Plastik und auch Metall Zahnrädern, aus dem ERCF Projekt ist schon die Erfahrung entstanden, dass diese jedoch bei stärkerer Belastung oft nicht sonderlich haltbar sind.
Daher habe ich jetzt mal ein kleines Testsetup aufgebaut bestehend aus einem XIAO Seeed RP2040 Mikrocontroller, einem Kraftsensor mit HX711 Wägezelle und einem NTC Thermistor.
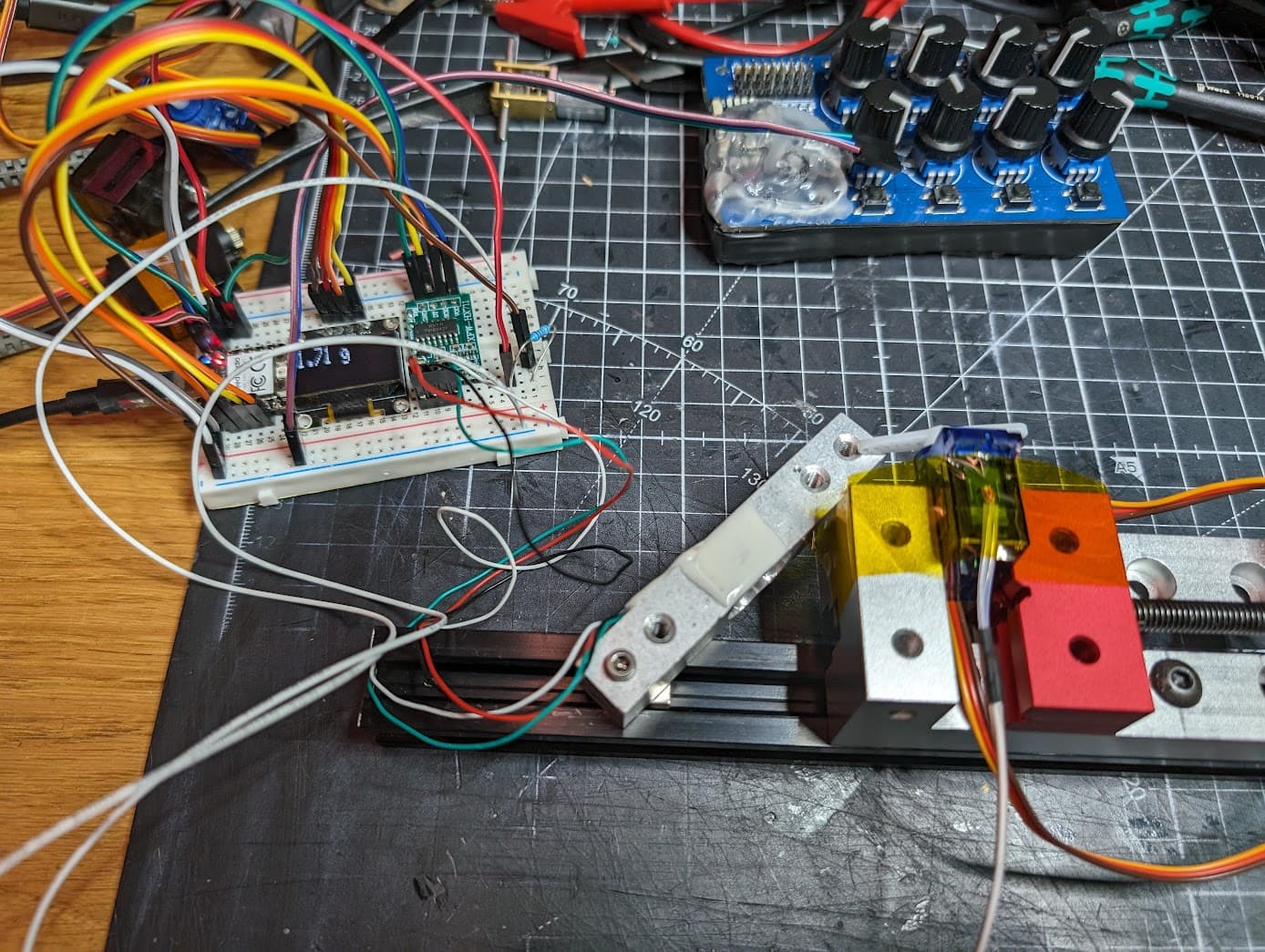
Der Servo ist in einem kleinen Schraubstock eingespannt, der zusammen mit dem Kraftsensor an einem 2020 Profil angebracht ist.
Oben auf dem Servo ist der Thermistor aufgeklebt um die Temperatur des Servos zu überwachen.
Testablauf, per Mikrocontroller wird der Servo auf den Kraftsensor gepresst um die Druckkraft des Servos zu Messen, ziel sind 100 Messungen, sofern der Servo dies übersteht, nach jedem Durchgang wird 100ms pausiert.
Pro Durchgang wird die Kraft und Temperatur gemessen.
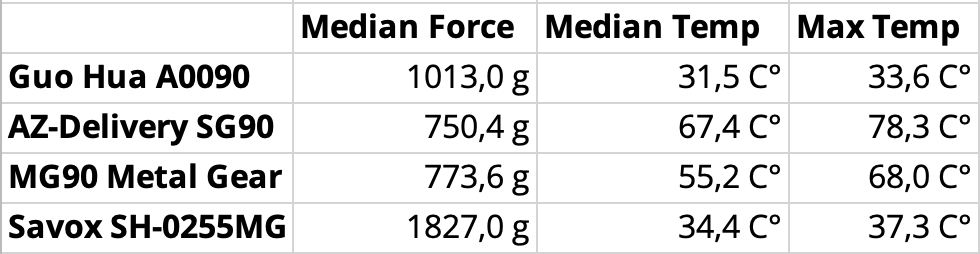
Kosten: 2-3€ pro Servo
Stromverbrauch bei 5V unter Last: ~350mA
Maximale Kraft: ~780g
Median Kraft: 750g
Mittelwert: 648g
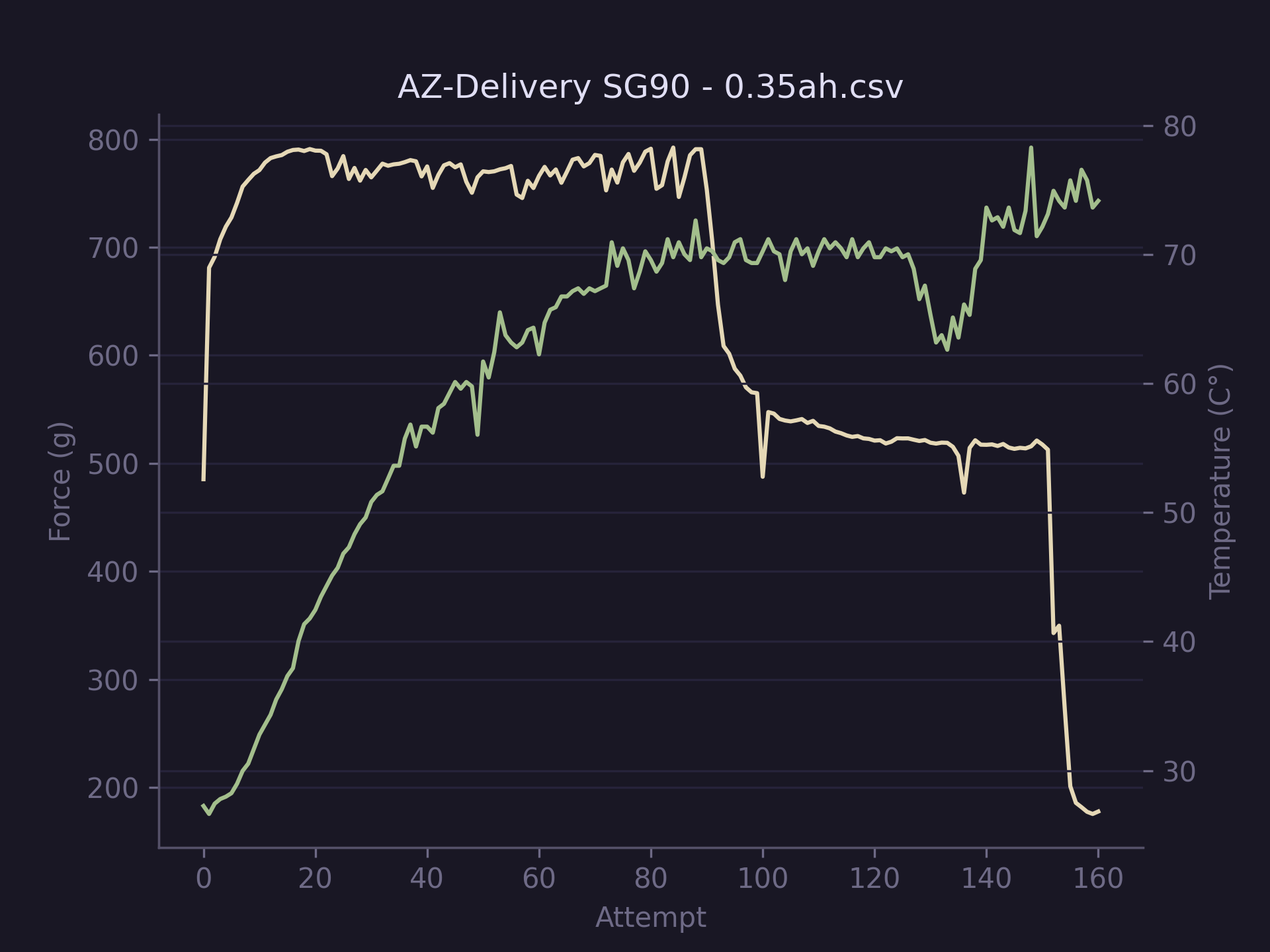
Dies ist der „schwächste“ Servo den ich getestet habe, die Kraft ist mit ~800g erstmal ganz ok, jedoch steigt die Temperatur, rapide an. Bereits nach 20 Durchgängen wird 40C° überschritten und ab dem 90. Durchgang wird 70C° überschritten wonach die Kraft auch kräftig nachlässt.
Ich habe diesen Servo etwas weiter laufen lassen und dann bei 160 durchgängen abgebrochen, weil der Servo anfing geräusche zu machen und noch weiter massiv an Kraft verlor.
Kosten: ~3€ pro Servo
Stromverbrauch bei 5V unter Last: ~600mA
Maximale Kraft: ~780g
Median Kraft: 774g
Durchschnitt: 787g
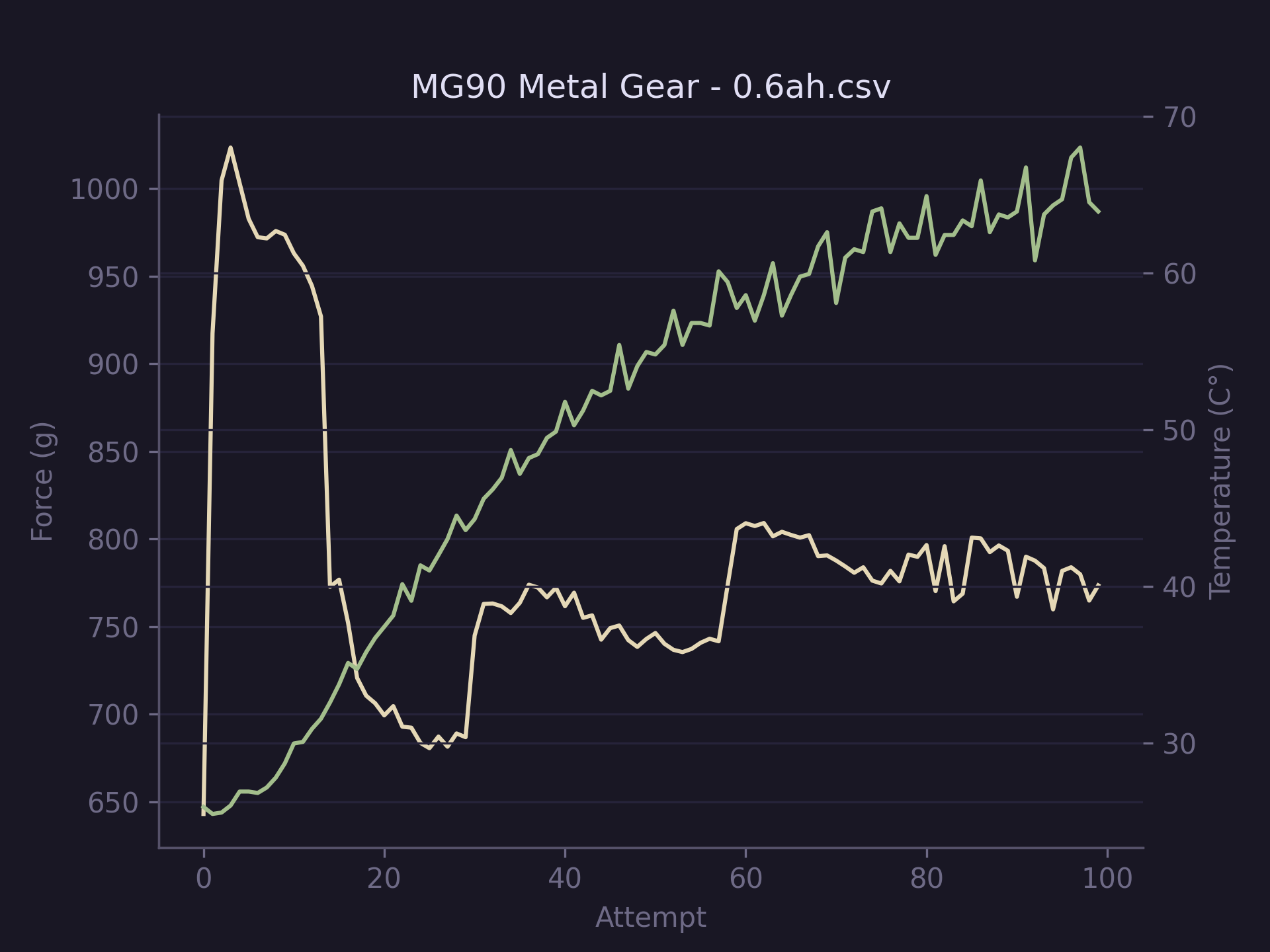
Auch hier stieg die Temperatur relativ schnell an und ging bis auf ~65C° hoch, am Anfang hatte er kurzzeitig einiges mehr an Kraft, pendelte sich dann jedoch bei ~780g ein, vergleichbar mit dem SG90, Stromverbrauch war jedoch deutlich höher als der SG90
Kosten: ~6-10€ pro Servo
Stromverbrauch bei 5V unter Last: ~400mA
Maximale Kraft: ~1075g
Median Kraft: 1013g
Durchschnitt: 1011g
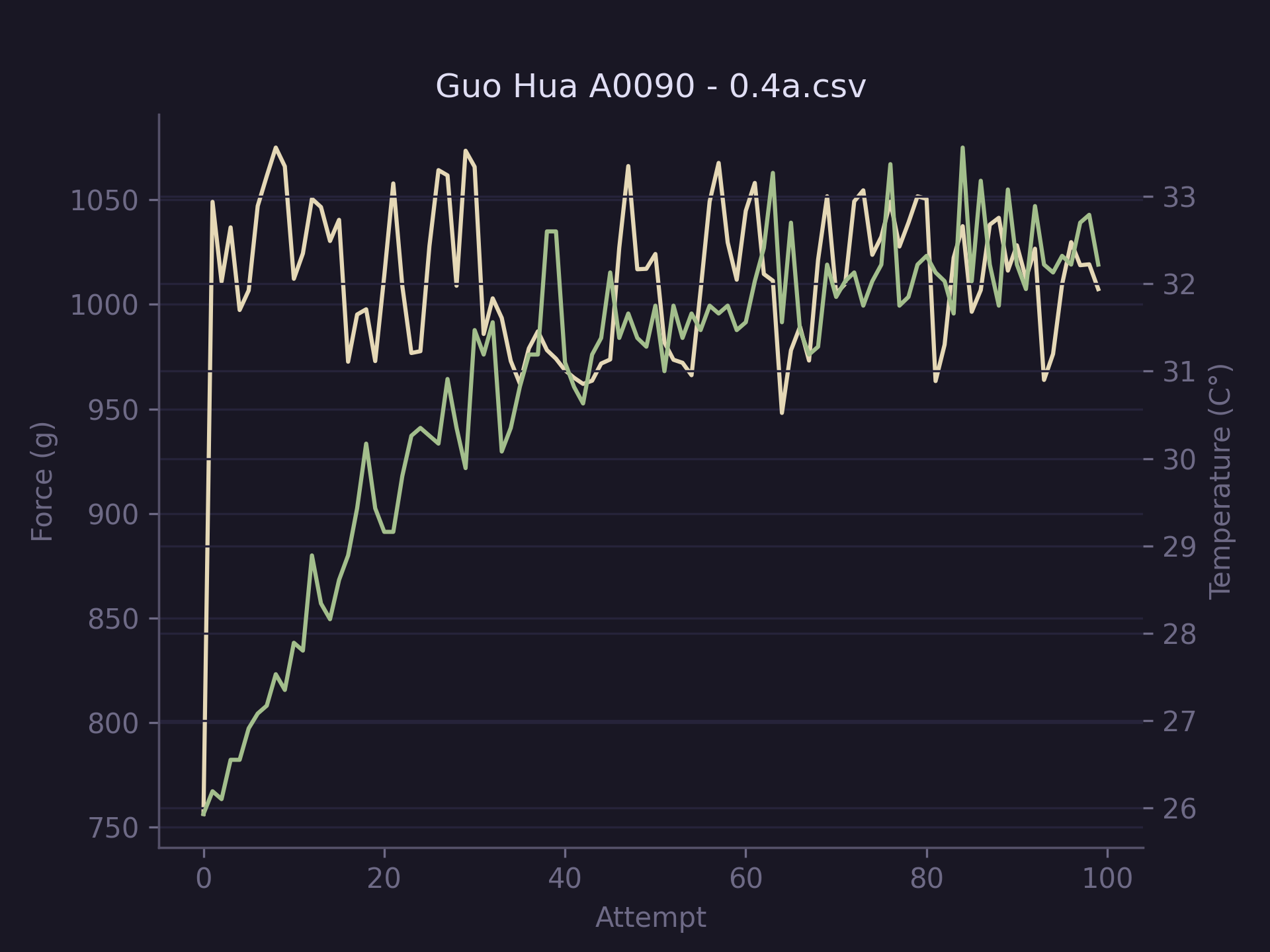
Dieser Servo ist hier so in Deutschland schwer zu bekommen, aber problemlos über AliExpress Verfügbar, er ist komplett aus Metall gefertigt und deutlich wertiger als die beiden bisherigen Servos.
Er hat auch etwas mehr Kraft als die beiden anderen aber vor allem die Temperatur ist hier deutlich besser, was auf eine bessere Langlebigkeit schließen lässt.
Kosten: ~23€ pro Servo
Stromverbrauch bei 5V unter Last: ~600mA
Maximale Kraft: ~1900g
Median Kraft: 1827g
Mittelwert: 1820g
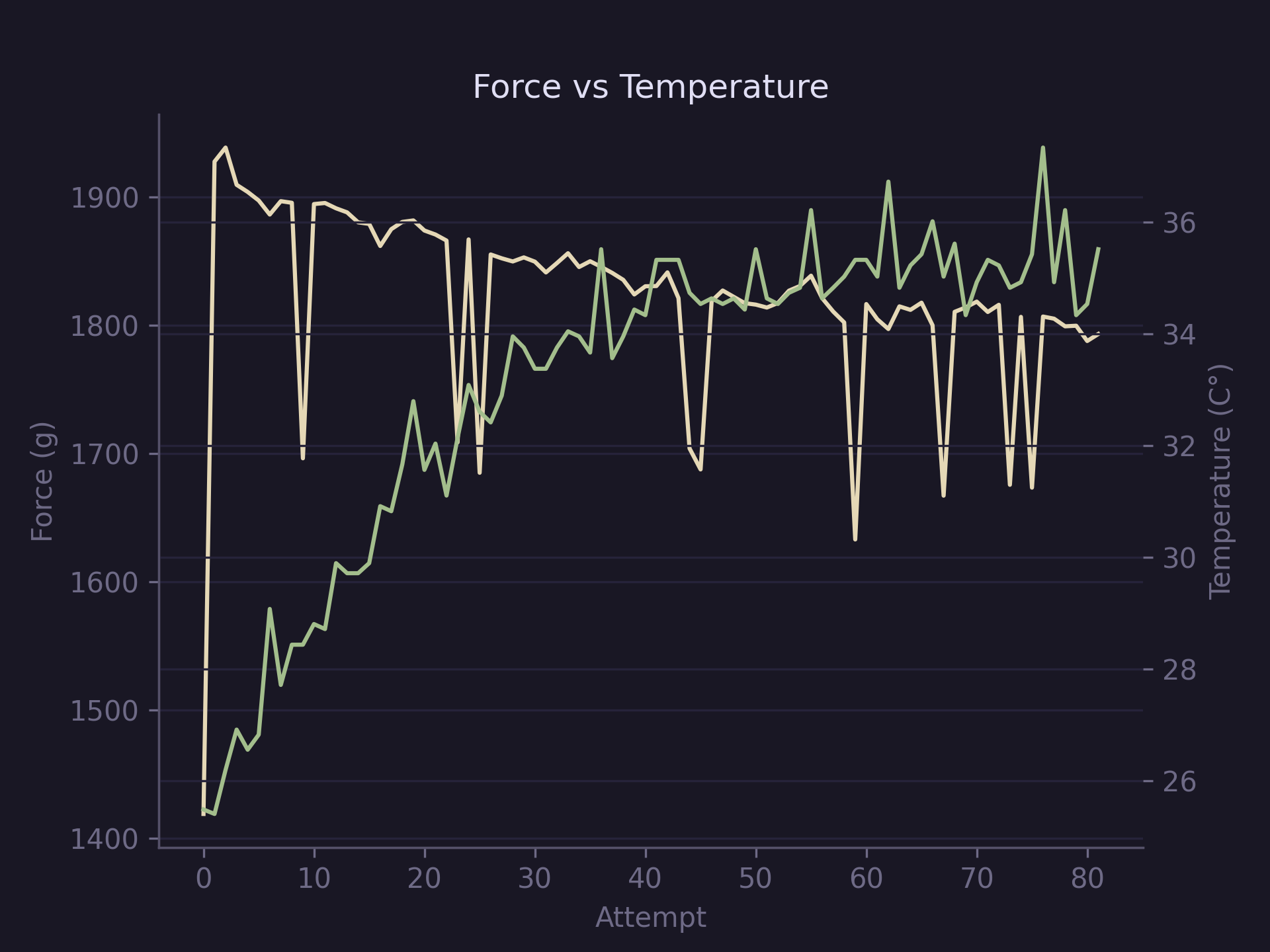
Das hier ist der teuerste Servo den ich getestet habe, aber er überzeut auch definitiv mit seiner Leistung, die weit über den anderen liegt und das ohne von der Temperatur ins Schwitzen zu kommen oder massiv Strom zu verbrauchen, wenn der Preis nicht deutlich höher wäre, würde ich diesen Servo ausschließlich nutzen.
Zum Abschluss hier nochmal ein Diagram in dem die 4 Servos zum Vergleich drin sind, die durchgezogene Linie ist die Kraft, die gestrichelte ist die Temperatur:
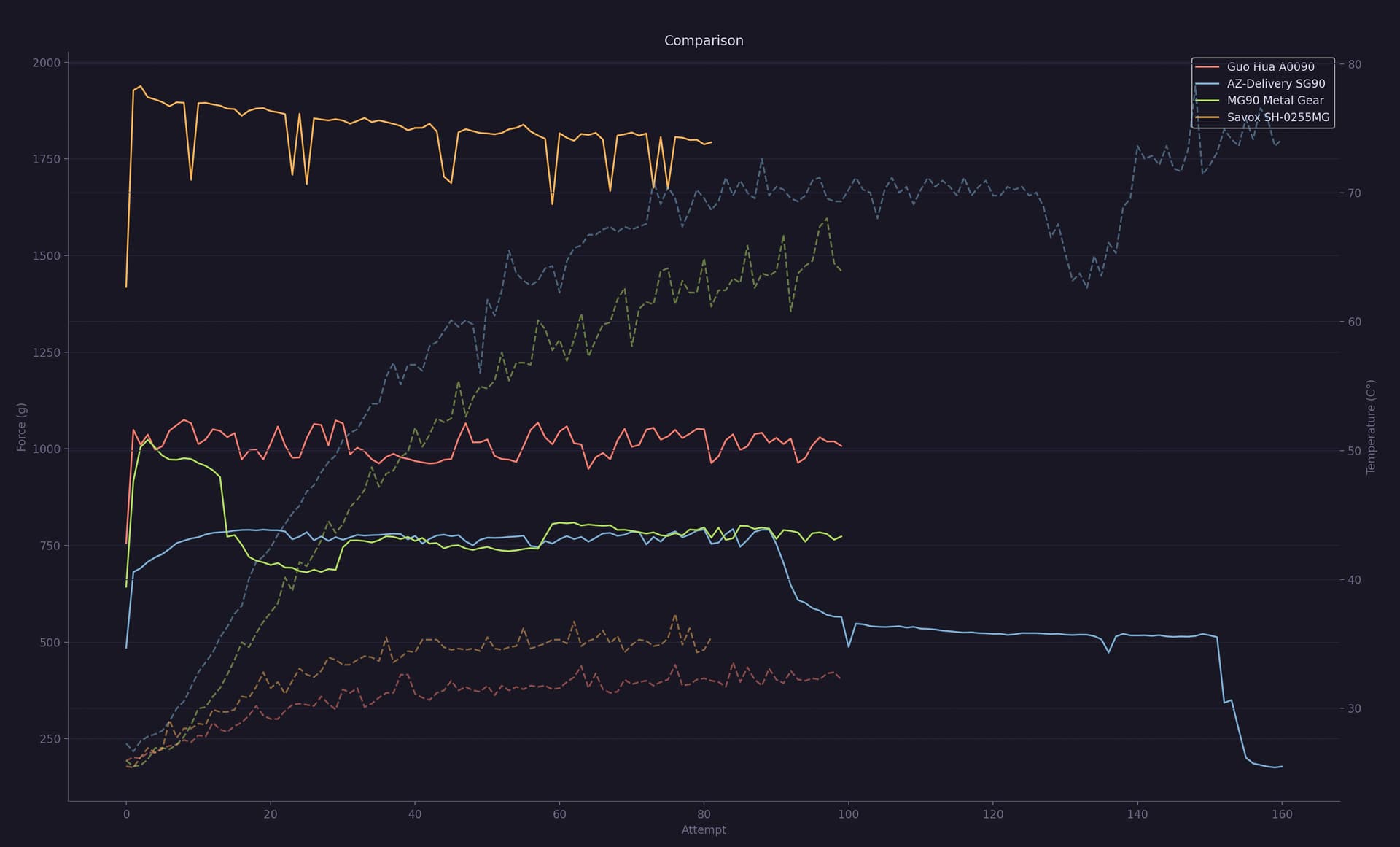
Auch in diesem Diagram sticht der Savöx klar raus, bei der Kraft tront deutlich über den anderen während die Temperatur unten nur knapp über dem Guo Hua liegt und sich scheinbar bei ~35C° einpendelt.