Ja, das ist auch ziemlich cool, da waren auf welche auf der Maikerfaire Ruhr 


1 „Gefällt mir“
Mittlerweile sind die meisten Teile gedruckt und die nötigen Motoren, etc. trudeln ein.
Ich hab auch noch ein paar Vallejo Farben geordert um bei den Farben möglichst „reproduzierbar“ zu bleibeben, falls ich nochmal ein Teil tausche in der Zukunft


1 „Gefällt mir“
Ein paar kleine Servo Tests 
1 „Gefällt mir“
Haste nicht mal Lust (und Zeit) ein kleinen Workshop bzgl. Pi Programmierung zu machen ?
Ich kenn mich wohl etwas mit Arduino und Co. aus aber nen Pi selbst zu programmieren hab ich noch nicht versucht, sieht aber auf deinen Bildern/Videos recht vielversprechend aus.
Und deine Taktung was Projekte angeht sucht echt seinesgleichen.
Respekt was du so alles auf die Reihe bekommst, ich glaub ich dürfte bei dem Tempo das schlafen einstellen 
Noch läuft da gar kein Raspberry Pi oder Pico, die Software ist Grunsätzlich auch schon vorhanden vom Macher: GitHub - chillibasket/walle-replica: Robot and controller code for a replica robot
Ich bin zwar beruflich Programmierer, aber habe mit Raspberry, Arduino, ESP32, etc. bisher auch hauptsächlich rum gespielt.
Grundsätzlich könnten wir aber mal einen Workshop machen denke ich oder einfach so mal ein bisschen rum probieren.
Was genau würde dich denn da an einem Raspberry Pi interessieren?
Zu viele Projekte ist definitiv meine große Schwäche, ich fange viel an und dadurch ziehen sich einige Projekte auch relativ lange hin 
Moin,
so einen richtigen Wunschzettel gibts meinerseits gar nicht.
Bis jetzt reichten immer so ein paar Hinweise um auf die Füsse zu kommen, laufen hab ich bis jetzt immer selber gelernt.
Aber unter der Annahme das es vlt. noch andere interesiert:
- Betriebssystem installieren (einschl. Webzugang und SSH)
- Programmieroberfläche (Windows oder direkt auf dem pi?)
- Grundsätzliches Pin I/O
- Datenbankanbindung
- (Web-) Frontend
- Einrichten von Autostart der Programme ohne/mit Login
Vielleicht kann man das ja mit nem konkreten Projekt koppeln.
Bei dem Gedanken eines Windrades, Vertikales Windrad, hab ich mir überlegt das es ja durchaus Sinn macht sich Gedanken über die effizienu eines solchen Windrades Gedanken zu machen. Nicht das man Stunden an Arbeit und Eutos investiert und es langt grade mal zum Betreib einer LED.
So kam der Gedanke erstmal einen Aneometer zu bauen um damit die Windgeschwindigkeit über einen gewisssen Zeitraum zu loggen. Da wäre quasie alles enthalten, von Datenbank über Web-Frontend, Pin I/O, etc…
Das ganze könnte ja auf Dauer eine komplette Wetterstation sein die autark läuft. Und nicht wie die Dinger die zu kaufen sind und wo die Daten auf irgendwelchen Webservern liegen.
Alternativ:
Ich habe vor 2 Jahren eine Worduhr auf ESP32 basis gebaut. Da mir das Design heute nicht mehr gefällt bin ich angefangen eine neue bauen, vlt. kann man die auf nen Pi umstellen.
Oder, oder, oder … je mehr ich drüber nachdenke, desto mehr fällt mir ein
Aber meinetwegen keinen Stress machen, hab (leider auch) noch genügend .angefangenen Kram hier rumliegen.
Also einiges von den genannten Punkten kann ich zeigen und meistens auch die Hintergründe erläutern. Ich brauche zwar meist noch Google mit dabei, aber dann zeigt man auch direkt die passenden Foren mit.
Wir können uns Mittwoch gern mal detaillierter drüber unterhalten.
Schon witzig, das im Wall-E Thread - ein reines HobbyDing (find ich cool, keine Frage) die Sinnhaftigkeit eines Mini Windkraftwerks in Frage gestellt wird. Grundsätzlich eine gute Frage, aber wirkt erstmal komisch.
Falls dir deine zweite WordUhr besser gefällt nehme ich deine erste!
Sieht bei mir ähnlich aus, das meiste könnte ich Grundsätzlich zeigen, aber auch eher mit Google an der Hand.
Gerade im Bezug auf Raspberry Pi hab ich in der Vergangenheit häufig auf bereits existierenden Projekten aufgebaut und nicht wirklich bei 0 angefangen.
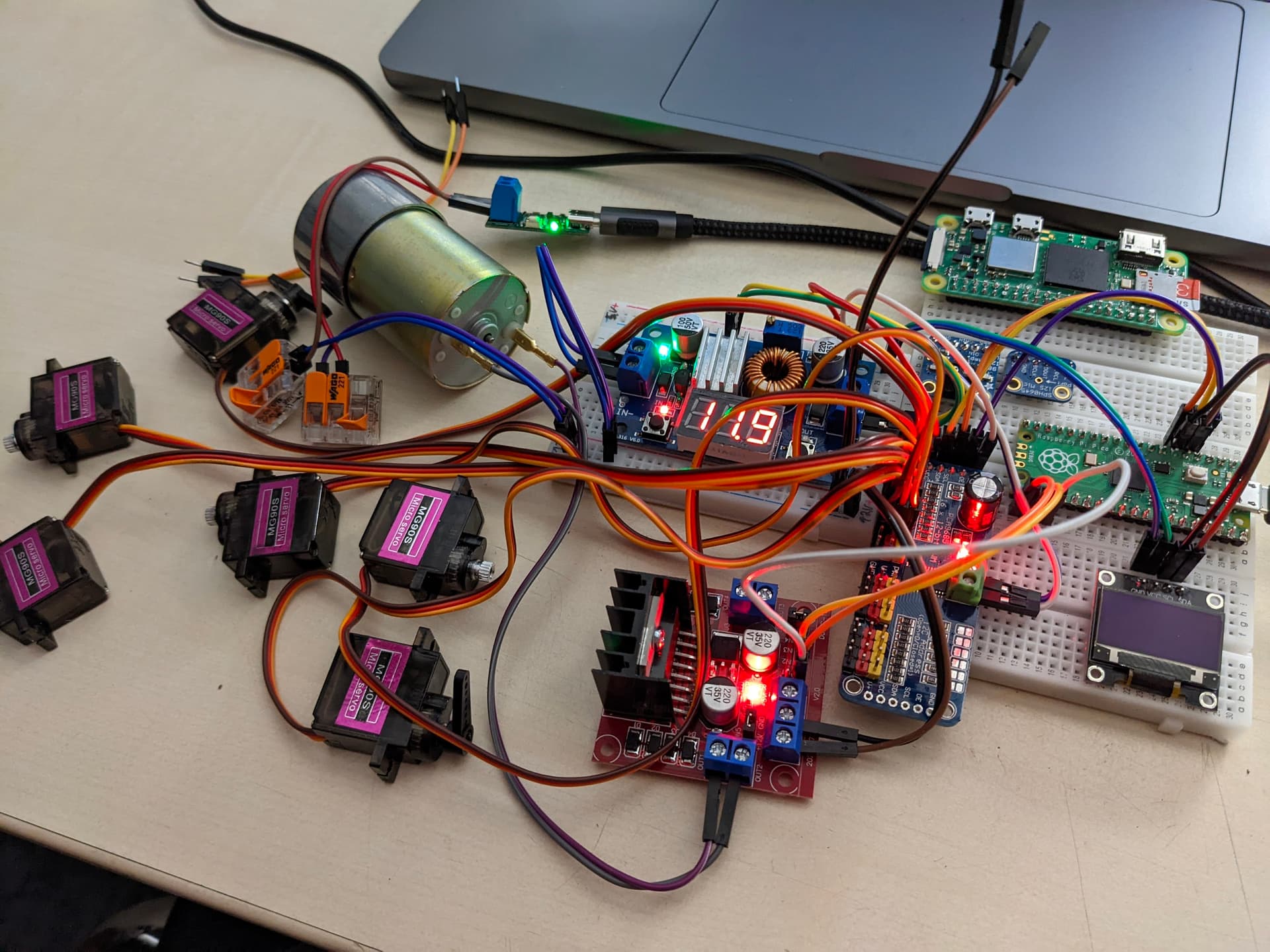
So, ich hatte gestern auch ein bisschen lackiert, wobei ich heute nochmal ein paar Teile im CAD angegangen bin

Habe gestern auch kurz mal die Elektronik grob zusammen gesteckt, die vorhandene Software muss ich leider noch debuggen, läuft noch nicht so ganz:
Sachen, die ich noch an dem Ursprungsmodell anpasse:
- Servo für die Ladeklappe:
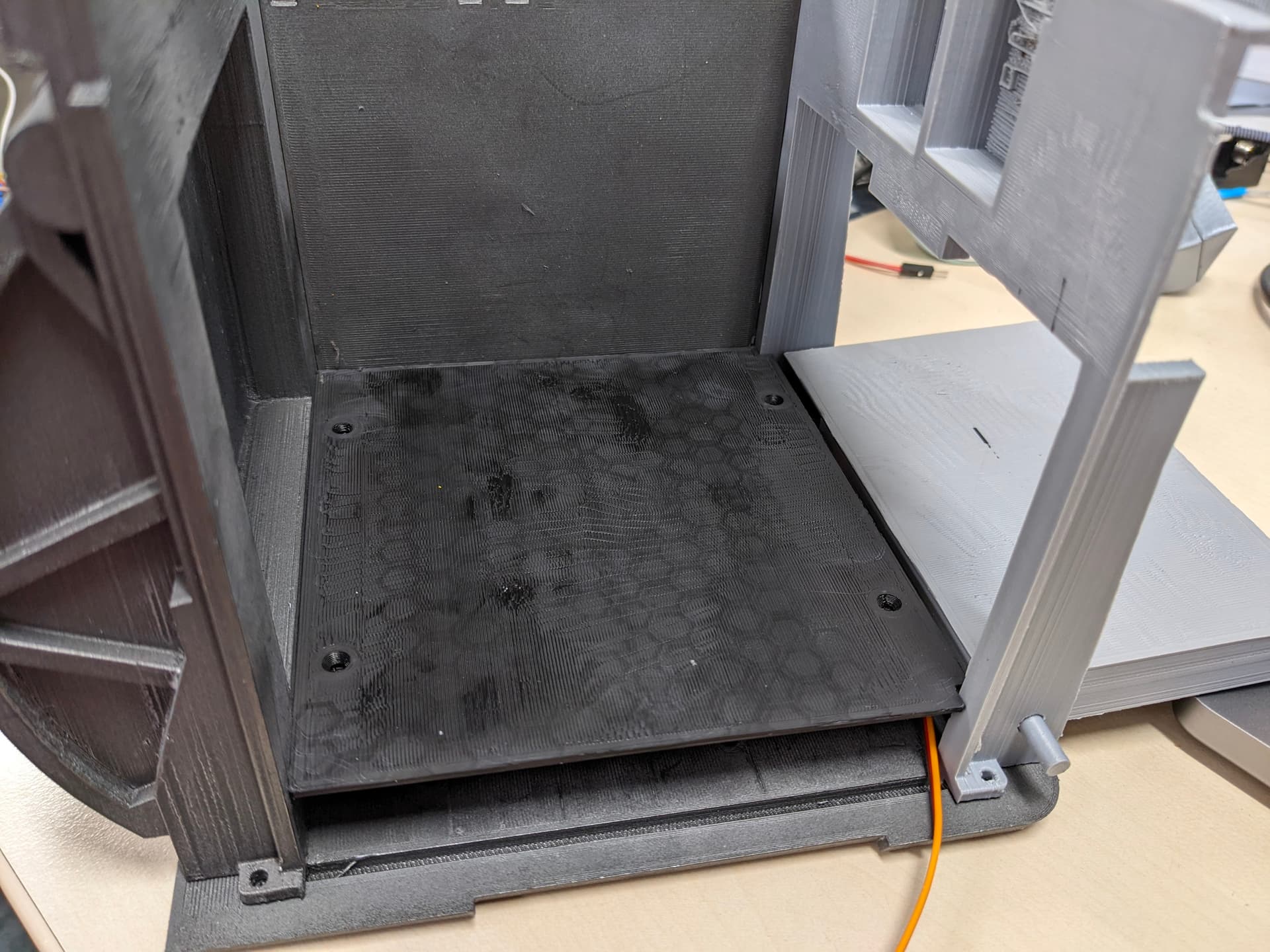
- Batteriefach, dass im „Boden“ des Laderaumes unter gebracht ist für 6x 18650er Zellen, zusätzlich ist links und rechts genug Platz für 2 BMS Platinen um die 18650 vernünftig laden zu können:

da kommt dann noch ein „Deckel“ drauf, damit das ganze in einer Höhe mit der Ladeklappe sein wird.
- (WIP) Dann will ich noch den einen Servo für den Hals aus dem Körper in den Hals verschieben, damit ich im roten Rechteck mehr Platz habe um dort die ganze Elektronik unter zu bringen:

Sieht schon richtig gut aus.
Wie schwer ist der Kopf? Braucht der Servo den Hebel?
Ich denke, dass der Hebel etwas übertrieben ist, der Kopf wiegt weit weniger als die 1.5KG, die die 9g Servos in der Lage sind zu bewegen.
So, der Entwurf für den Hals ist jetzt fertig, ich hab den Servo doch nicht oben in den Hals gemacht, sondern „nach hinten“ verschoben. Dadurch wird der vordere obere Bereich vollständig frei und der Bewegungswinkel vom Hals ist auch unverändert, habe ich kurz „manuell“ getestet, indem ich den Servo von Hand an der Stelle gehalten und mit dem Hals verbunden habe.
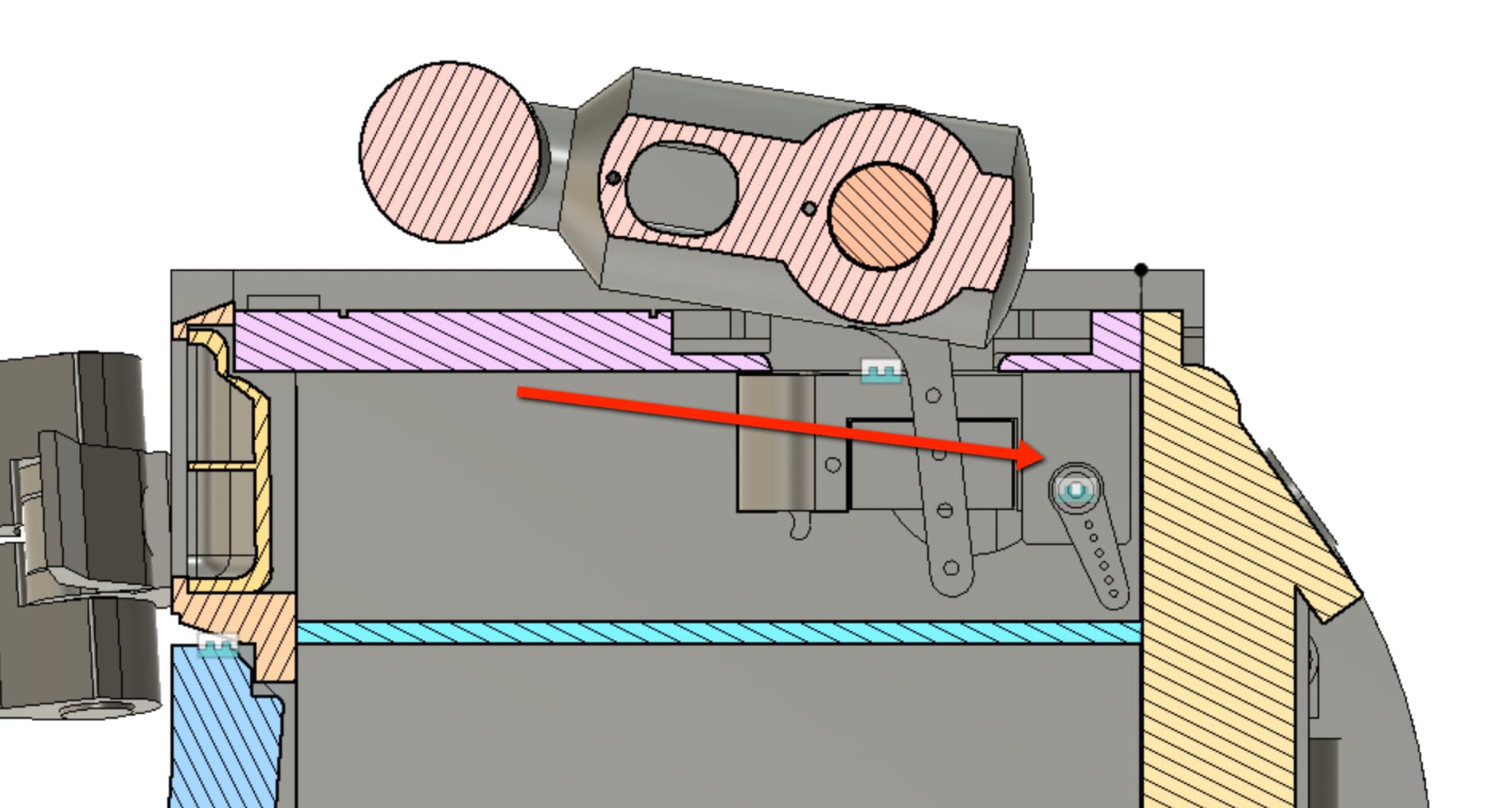
Zusätzlich sieht man in dem Bild, dass ich einen Zwischenboden (Türkis) eingebaut habe, der die Elektronik oben von dem Laderaum trennt. Ich denke dort sollte ich tatsächlich die Elektronik drin unter bekommen können.
Der Deckel für das Batteriefach unten ist auch fertig:
2 „Gefällt mir“
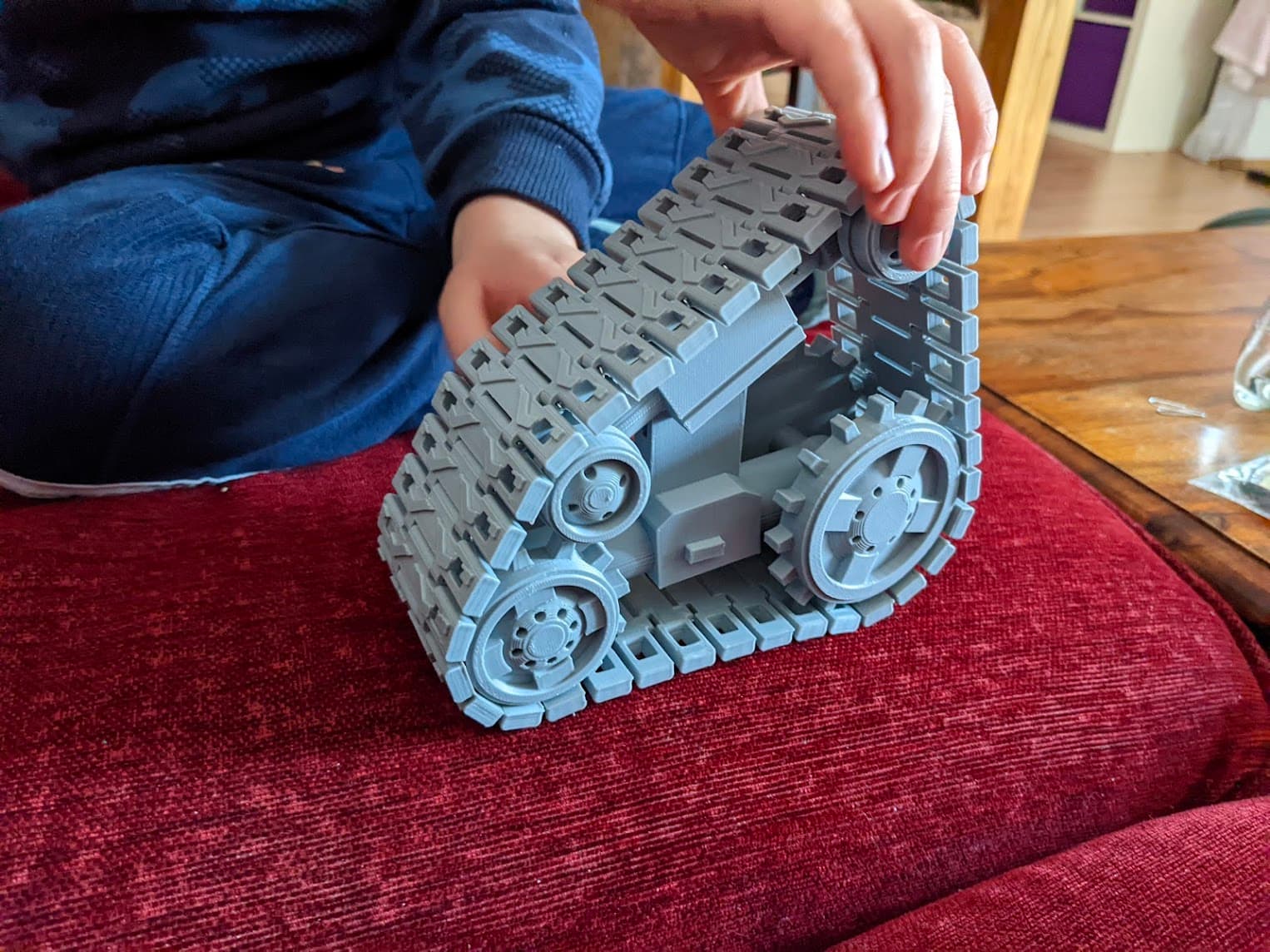
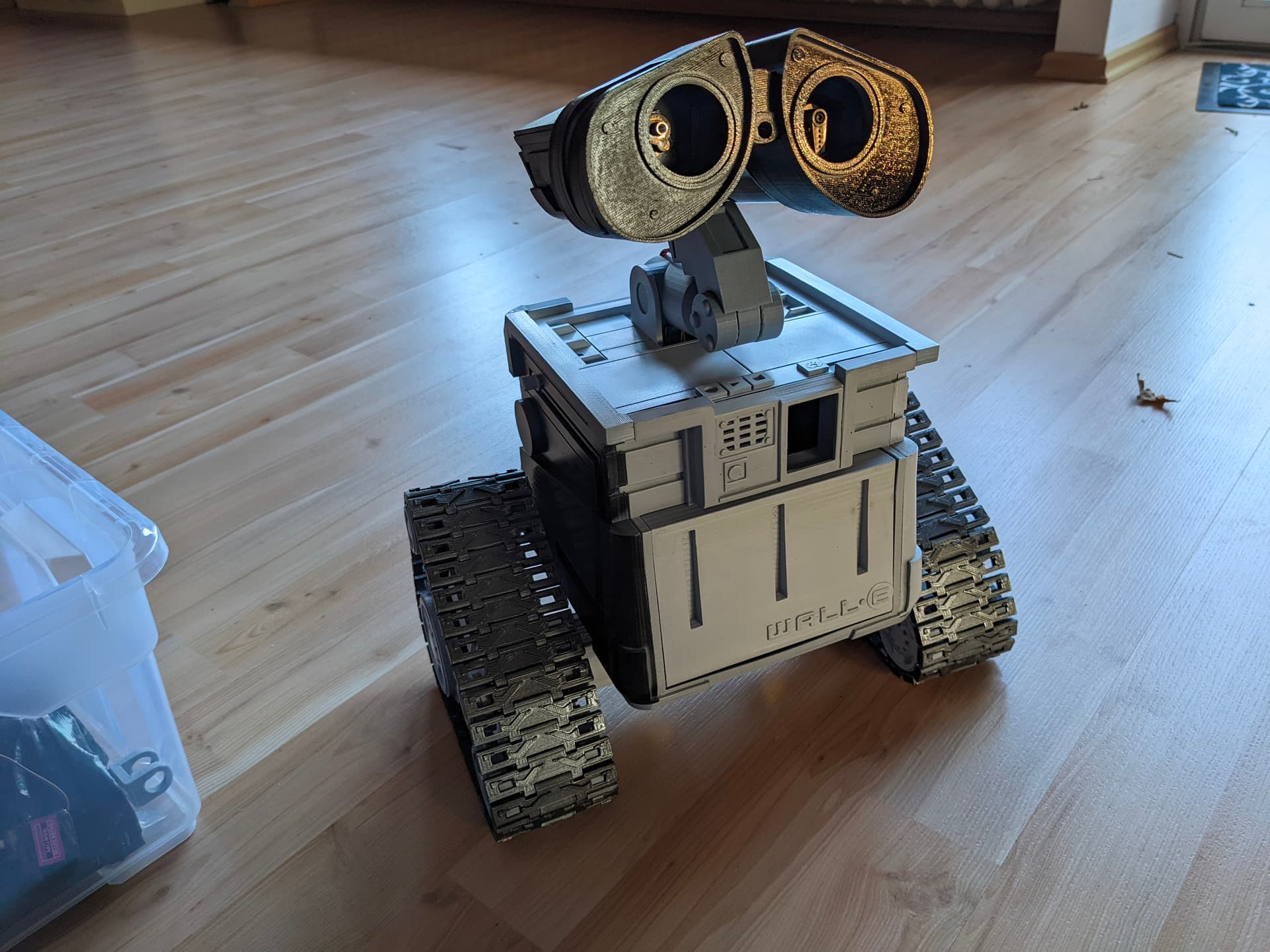
So, mein Junior meinte, ich müsste doch mal Wall-E weiter machen ![]()
Ich hab den Kopf quasi nochmal komplett neu gemacht, so dass das CAD jetzt sauber ist, die Augenbrauen werden ordentlich bewegt und die Kopfhälften werden auch schön bewegt.
Statt über einen Hebel werden die Kopfhälften jetzt über ein Zahnrad bewegt, so dass es deutlich robuster und Stabiler ist:
Womit ich auch noch sehr unzufrieden bin ist der Hals, der ist aktuell einfach sehr wackelig und instabil, das Problem ist, dass dort wirklich wenig Platz ist um die nötige Hardware unterzubringen um die Gelenke zu bewegen, MG90s Servos sind etwas zu groß und kleinere Servos sind zu schwach.
Ich hab mit diversen Mechanismen experimentiert, wie z.b. Bowdenzug, aber das aktuell viel versprechendste ist quasi ein „DIY Servo“.
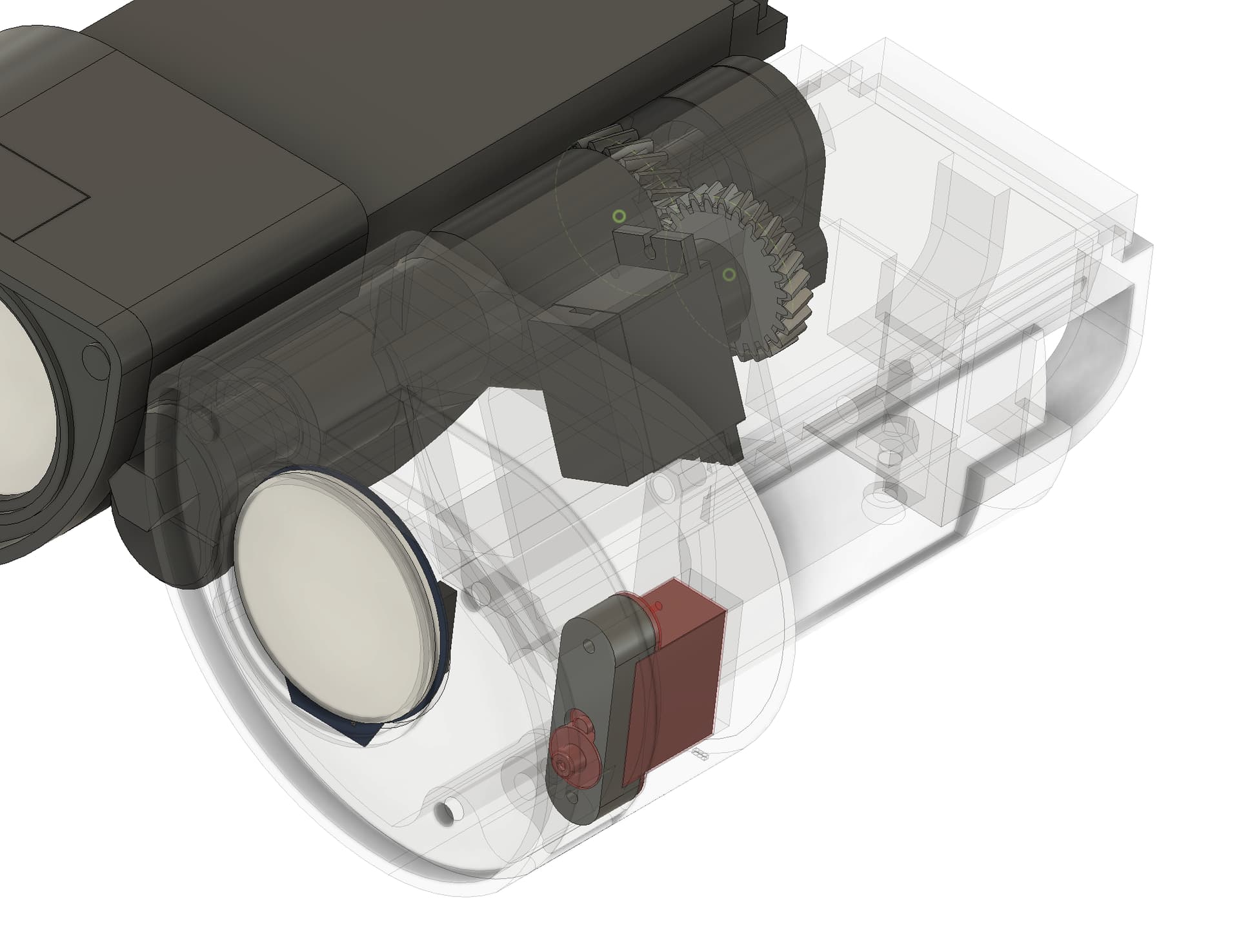
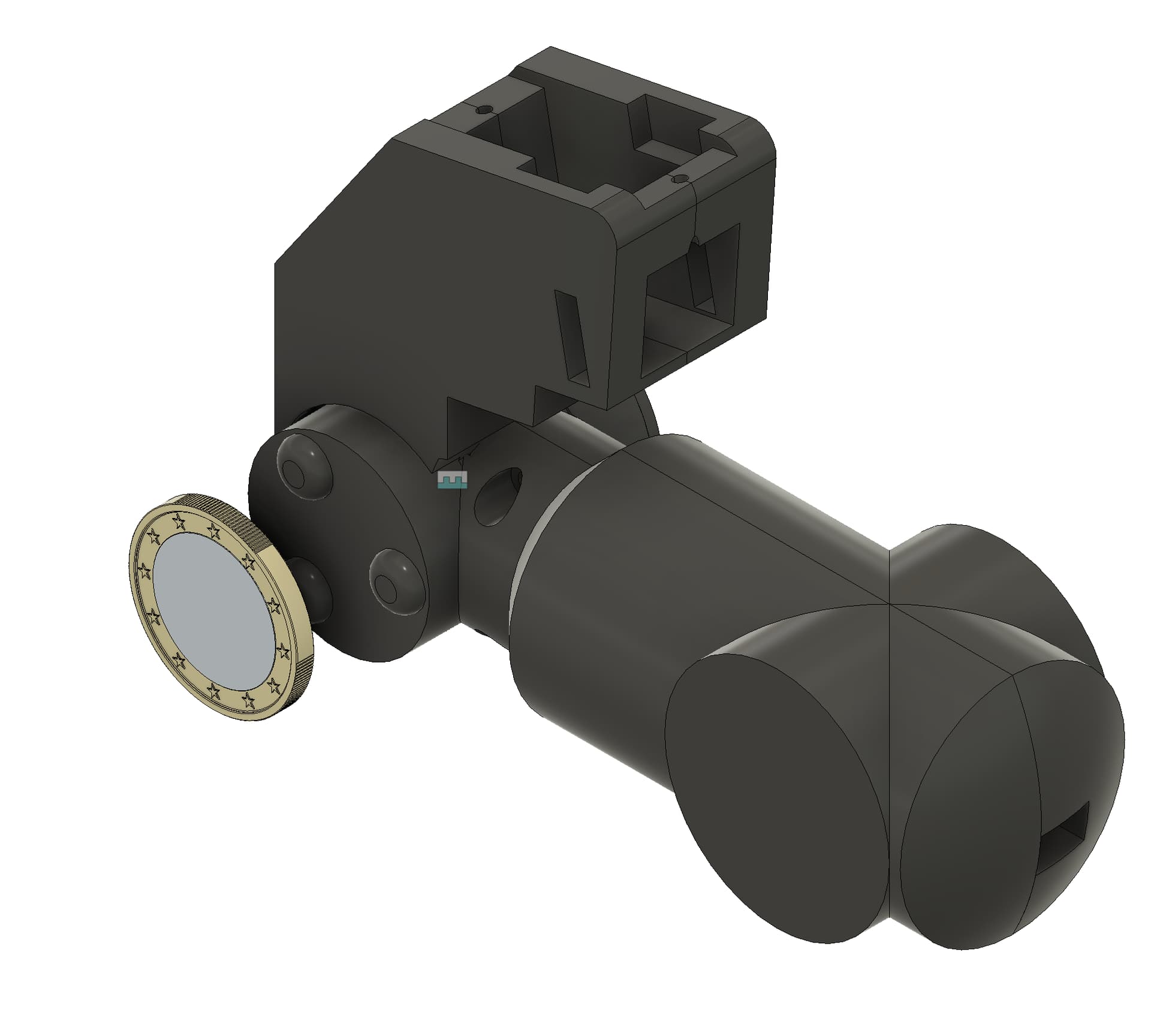
D.h. ich nehme einen N20 DC Motor mit 90° Getriebe um das gelenk zu bewegen und packe zusätzlich einen Encoder in das Gelenk um den Motor zu überwachen:
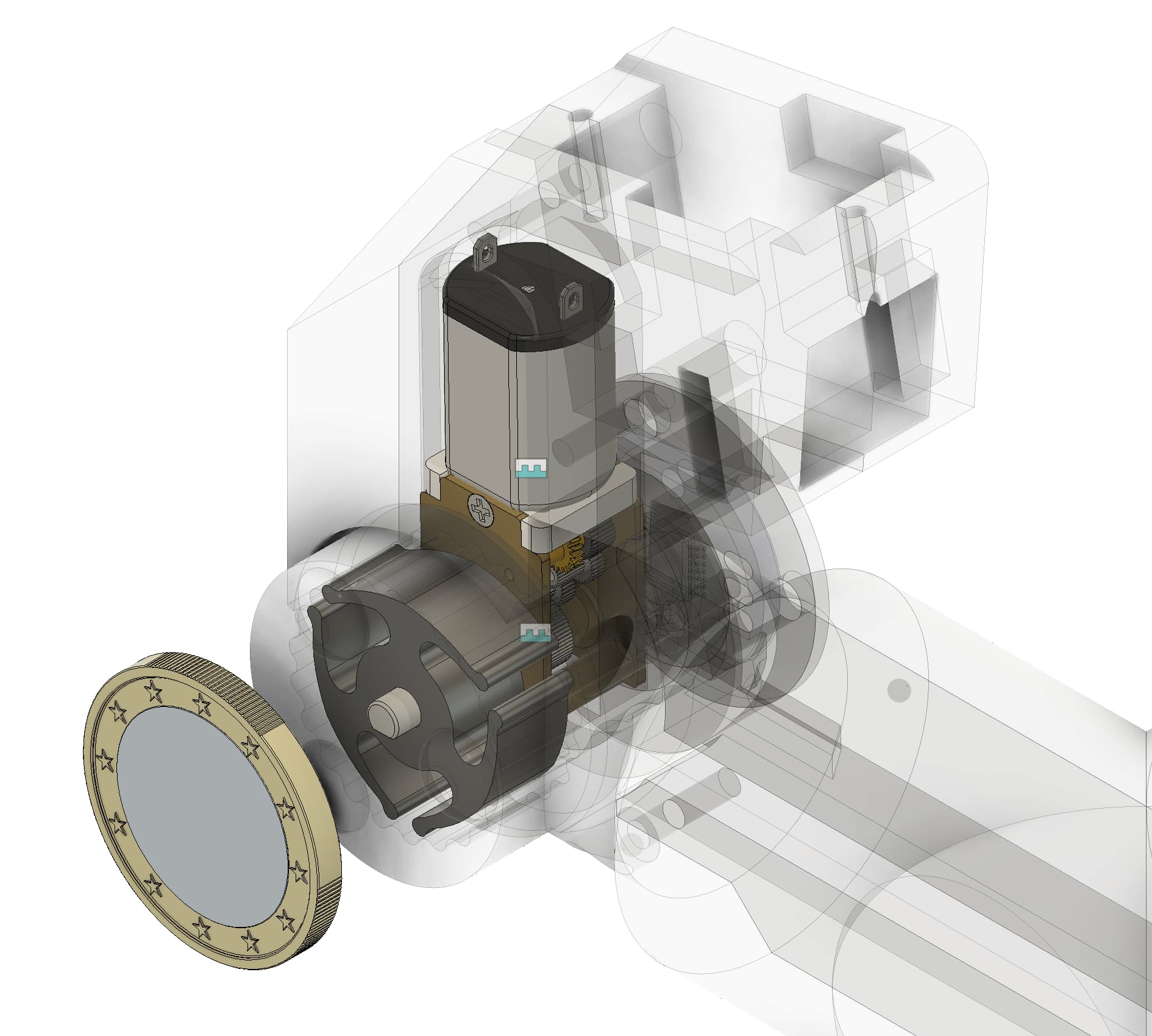
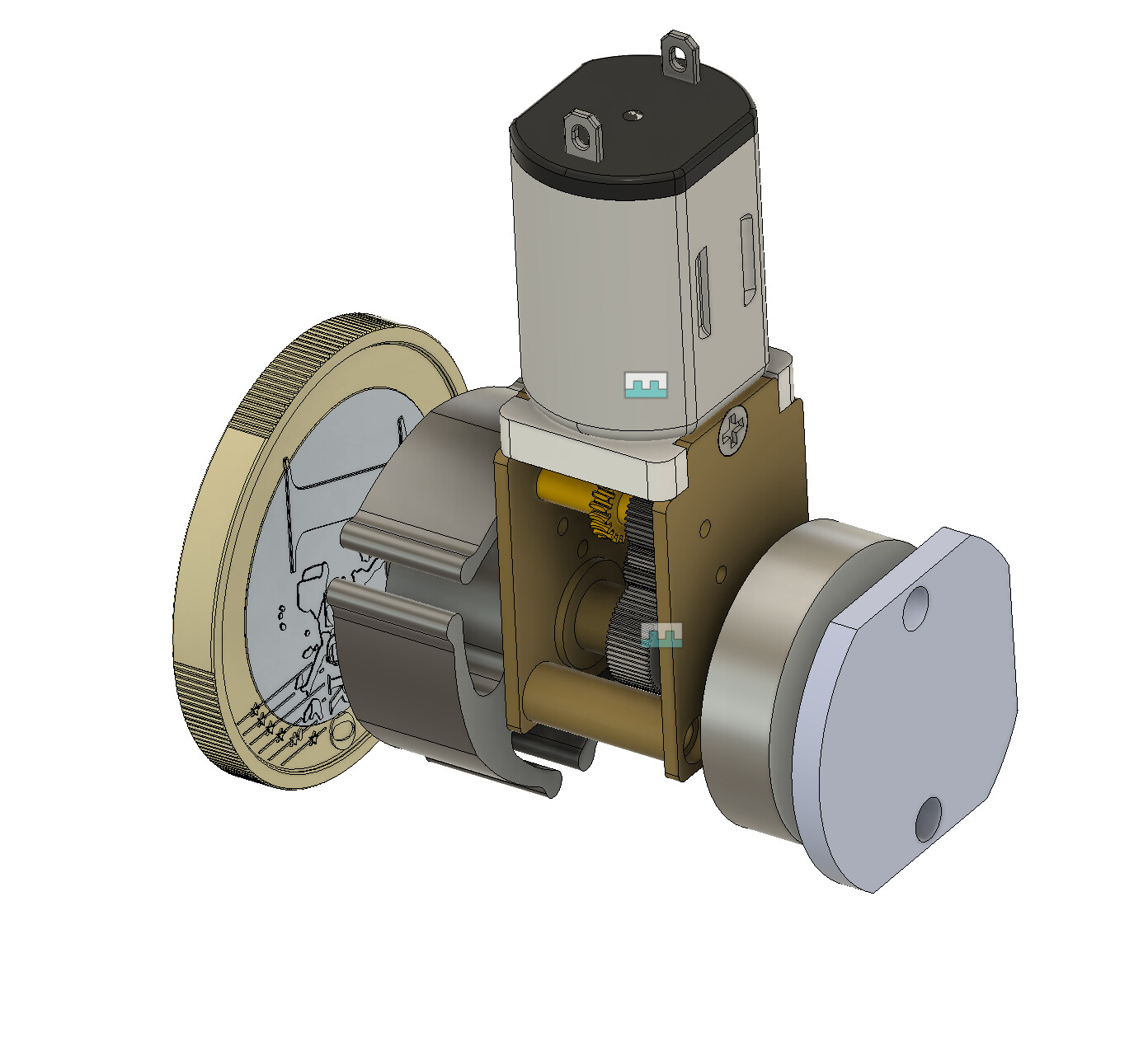
Durch den Encoder kann ich real messen ob das Gelenk sich aktuell bewegt oder welche Ausrichtung das Gelenk gerade hab, d.h. ich kann sogar ein gewisses „Homing“ ausführen um den Startpunkt zu ermitteln.
Um die Zahnräder und den Motor nicht zu überlasten hab ich auch noch einen Drehmomentbegrenzer eingebaut, der überspringt, wenn eine gewisse drehkraft überschritten wird:
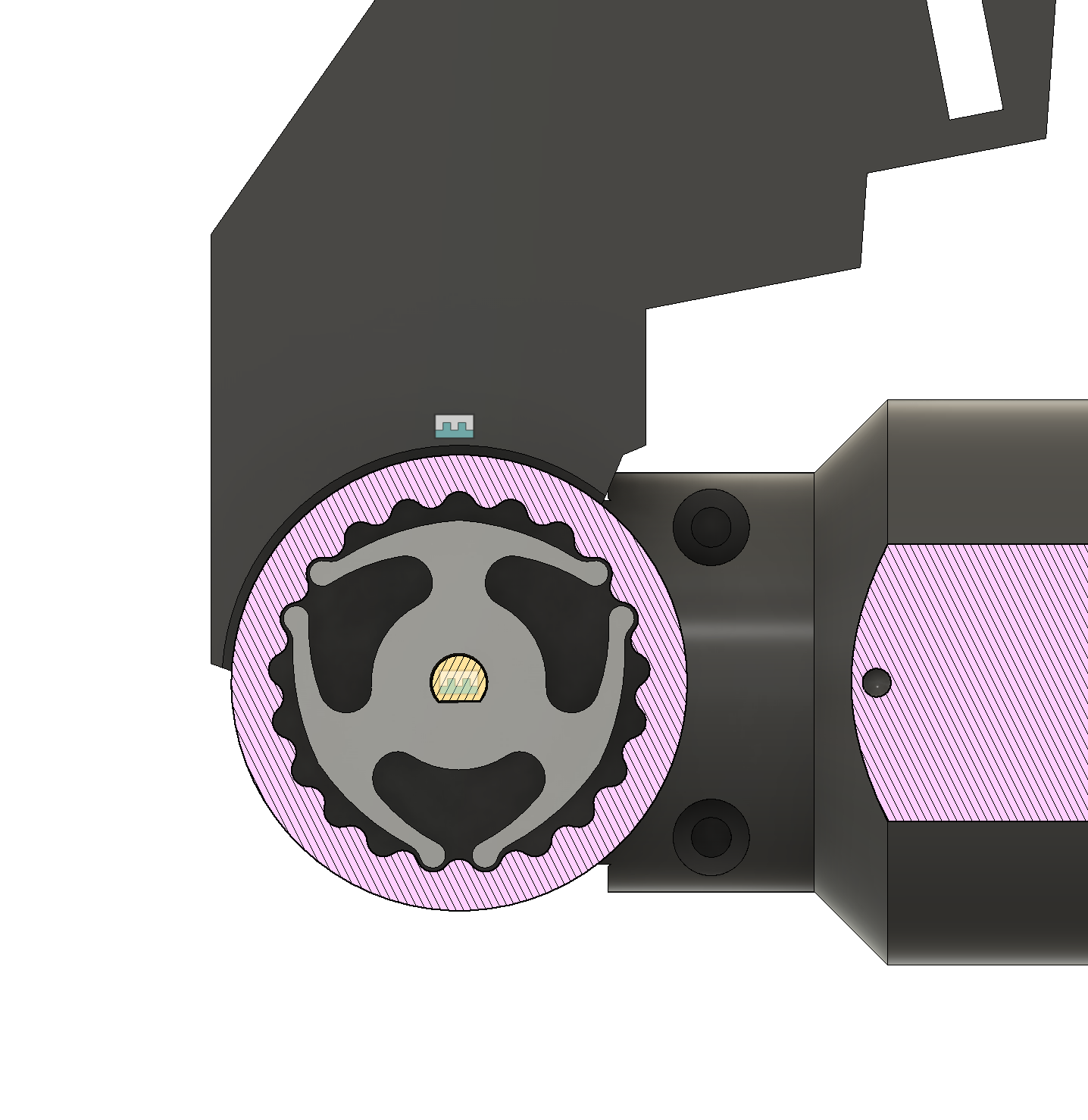
4 „Gefällt mir“
So cool einfach!!! ![]()
So, hab die letzten Tage einen kleinen Exkurs in das Stresstesten von „Micro“ Servos gemacht, konkret hier Servos in der größe des weit vebreiteten „MG90“.
Es gibt viele günstige Servos dieser Bauform bei Amazon mit Plastik und auch Metall Zahnrädern, aus dem ERCF Projekt ist schon die Erfahrung entstanden, dass diese jedoch bei stärkerer Belastung oft nicht sonderlich haltbar sind.
Daher habe ich jetzt mal ein kleines Testsetup aufgebaut bestehend aus einem XIAO Seeed RP2040 Mikrocontroller, einem Kraftsensor mit HX711 Wägezelle und einem NTC Thermistor.
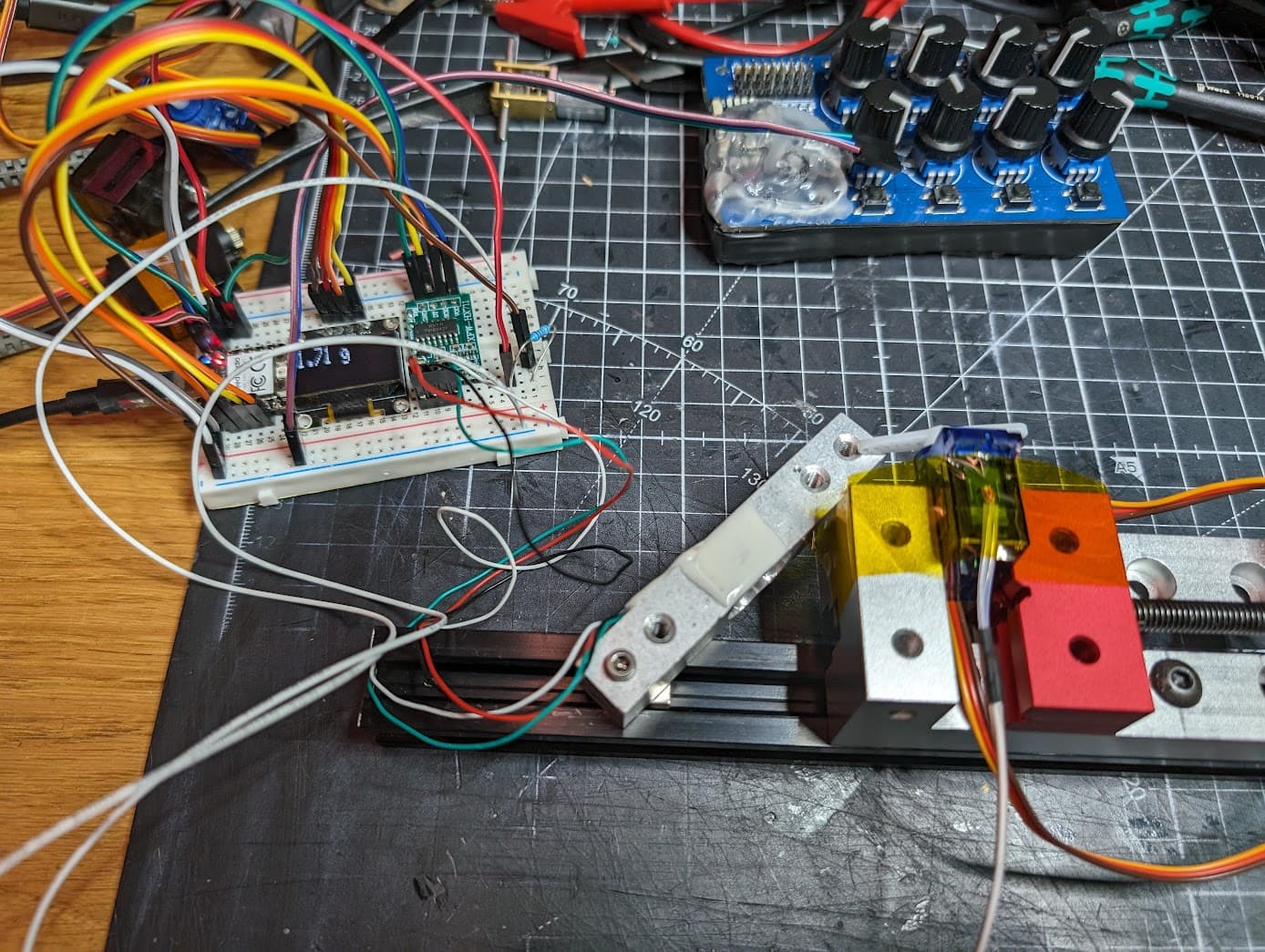
Der Servo ist in einem kleinen Schraubstock eingespannt, der zusammen mit dem Kraftsensor an einem 2020 Profil angebracht ist.
Oben auf dem Servo ist der Thermistor aufgeklebt um die Temperatur des Servos zu überwachen.
Testablauf, per Mikrocontroller wird der Servo auf den Kraftsensor gepresst um die Druckkraft des Servos zu Messen, ziel sind 100 Messungen, sofern der Servo dies übersteht, nach jedem Durchgang wird 100ms pausiert.
Pro Durchgang wird die Kraft und Temperatur gemessen.
Kosten: 2-3€ pro Servo
Stromverbrauch bei 5V unter Last: ~350mA
Maximale Kraft: ~780g
Median Kraft: 750g
Mittelwert: 648g
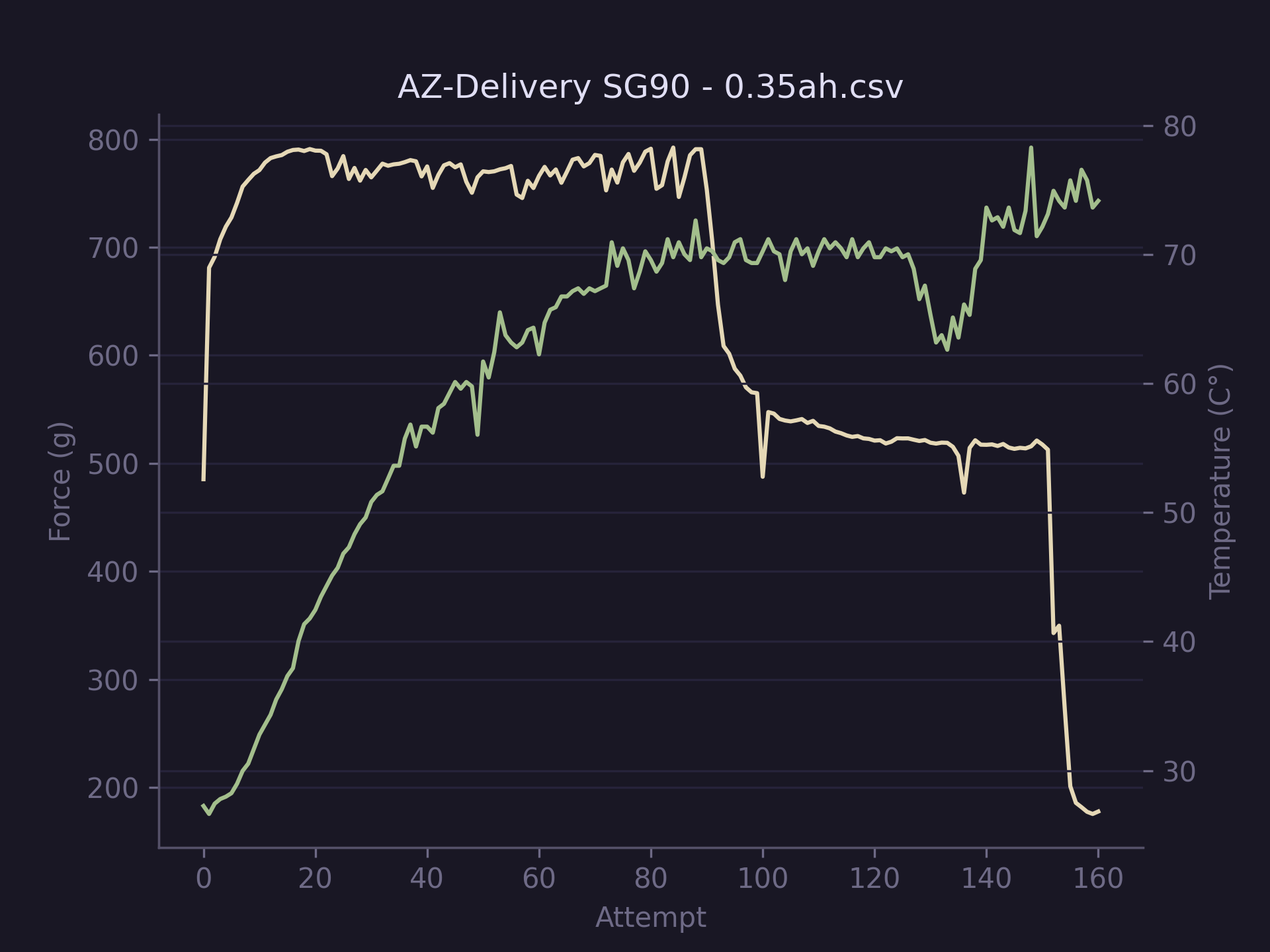
Dies ist der „schwächste“ Servo den ich getestet habe, die Kraft ist mit ~800g erstmal ganz ok, jedoch steigt die Temperatur, rapide an. Bereits nach 20 Durchgängen wird 40C° überschritten und ab dem 90. Durchgang wird 70C° überschritten wonach die Kraft auch kräftig nachlässt.
Ich habe diesen Servo etwas weiter laufen lassen und dann bei 160 durchgängen abgebrochen, weil der Servo anfing geräusche zu machen und noch weiter massiv an Kraft verlor.
Kosten: ~3€ pro Servo
Stromverbrauch bei 5V unter Last: ~600mA
Maximale Kraft: ~780g
Median Kraft: 774g
Durchschnitt: 787g
Auch hier stieg die Temperatur relativ schnell an und ging bis auf ~65C° hoch, am Anfang hatte er kurzzeitig einiges mehr an Kraft, pendelte sich dann jedoch bei ~780g ein, vergleichbar mit dem SG90, Stromverbrauch war jedoch deutlich höher als der SG90
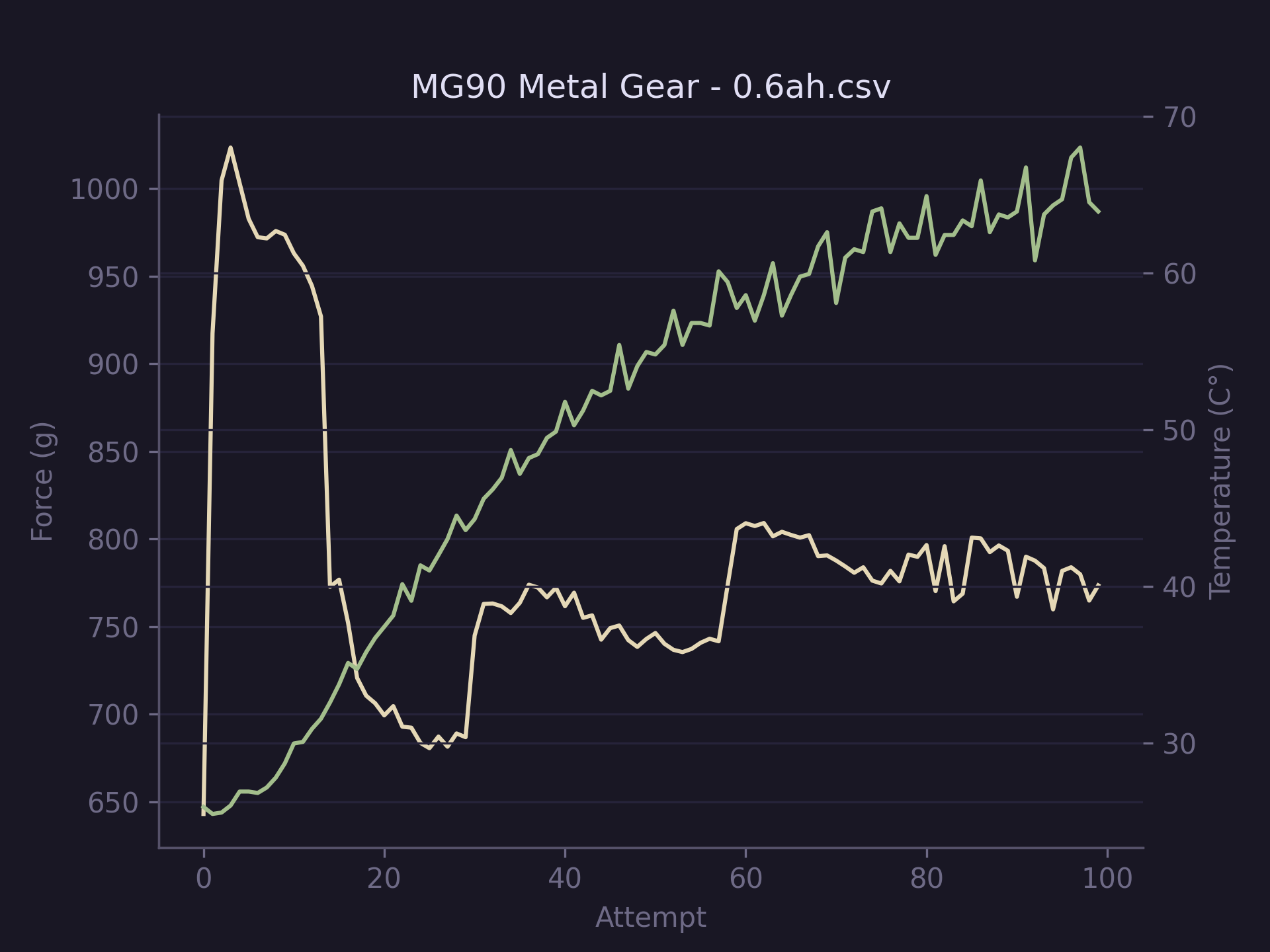
Kosten: ~6-10€ pro Servo
Stromverbrauch bei 5V unter Last: ~400mA
Maximale Kraft: ~1075g
Median Kraft: 1013g
Durchschnitt: 1011g
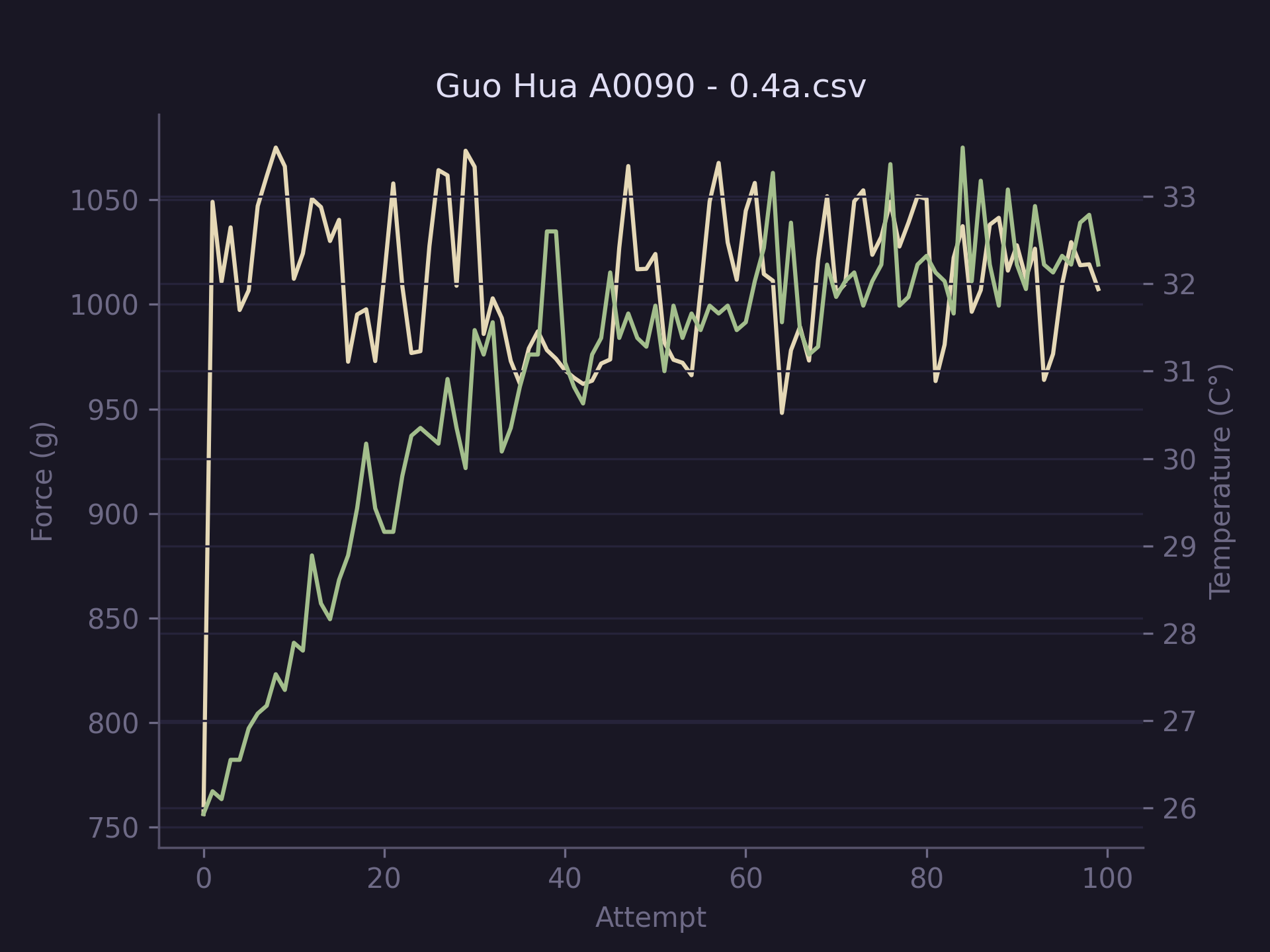
Dieser Servo ist hier so in Deutschland schwer zu bekommen, aber problemlos über AliExpress Verfügbar, er ist komplett aus Metall gefertigt und deutlich wertiger als die beiden bisherigen Servos.
Er hat auch etwas mehr Kraft als die beiden anderen aber vor allem die Temperatur ist hier deutlich besser, was auf eine bessere Langlebigkeit schließen lässt.
Kosten: ~23€ pro Servo
Stromverbrauch bei 5V unter Last: ~600mA
Maximale Kraft: ~1900g
Median Kraft: 1827g
Mittelwert: 1820g
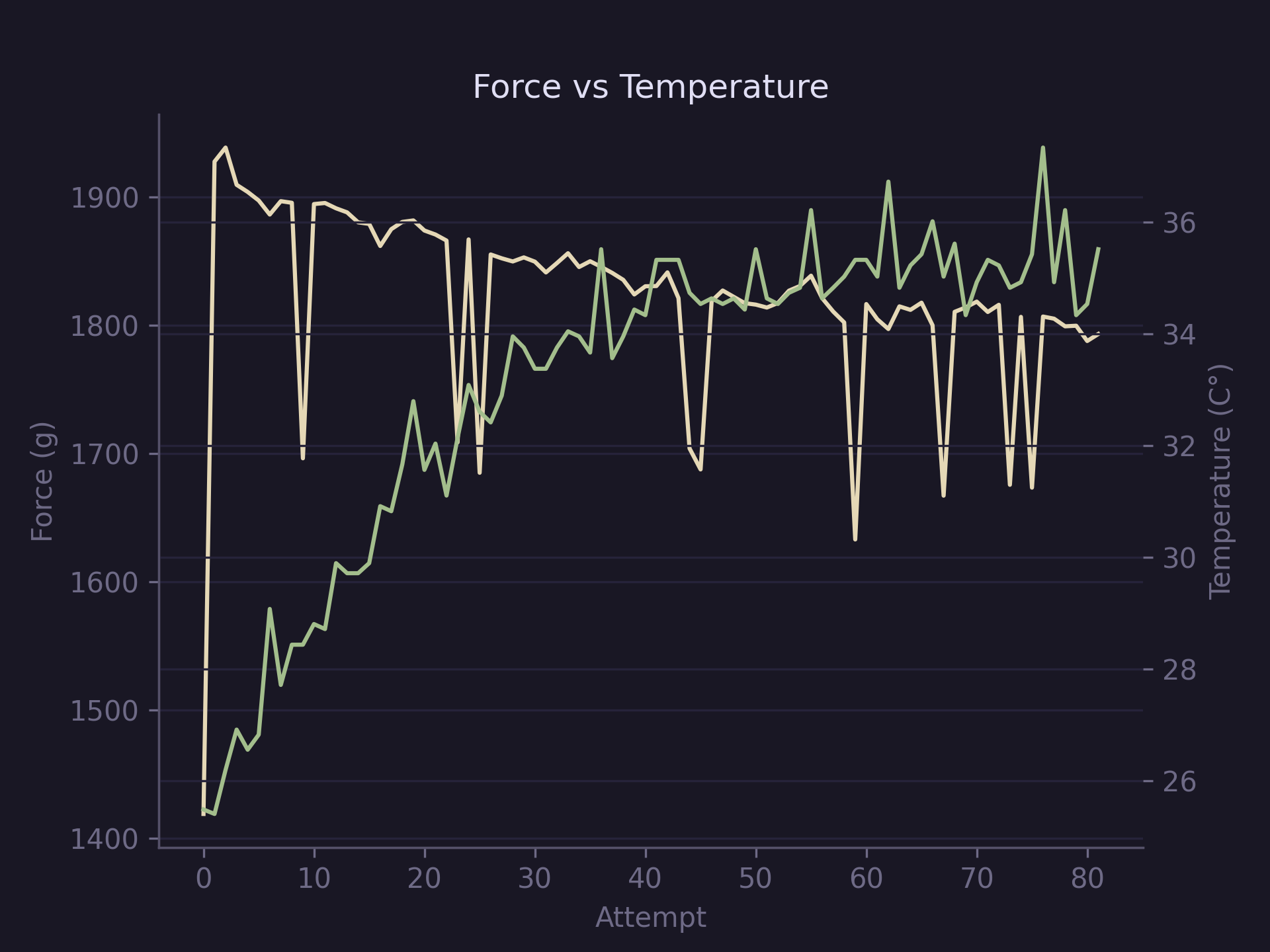
Das hier ist der teuerste Servo den ich getestet habe, aber er überzeut auch definitiv mit seiner Leistung, die weit über den anderen liegt und das ohne von der Temperatur ins Schwitzen zu kommen oder massiv Strom zu verbrauchen, wenn der Preis nicht deutlich höher wäre, würde ich diesen Servo ausschließlich nutzen.
Zum Abschluss hier nochmal ein Diagram in dem die 4 Servos zum Vergleich drin sind, die durchgezogene Linie ist die Kraft, die gestrichelte ist die Temperatur:
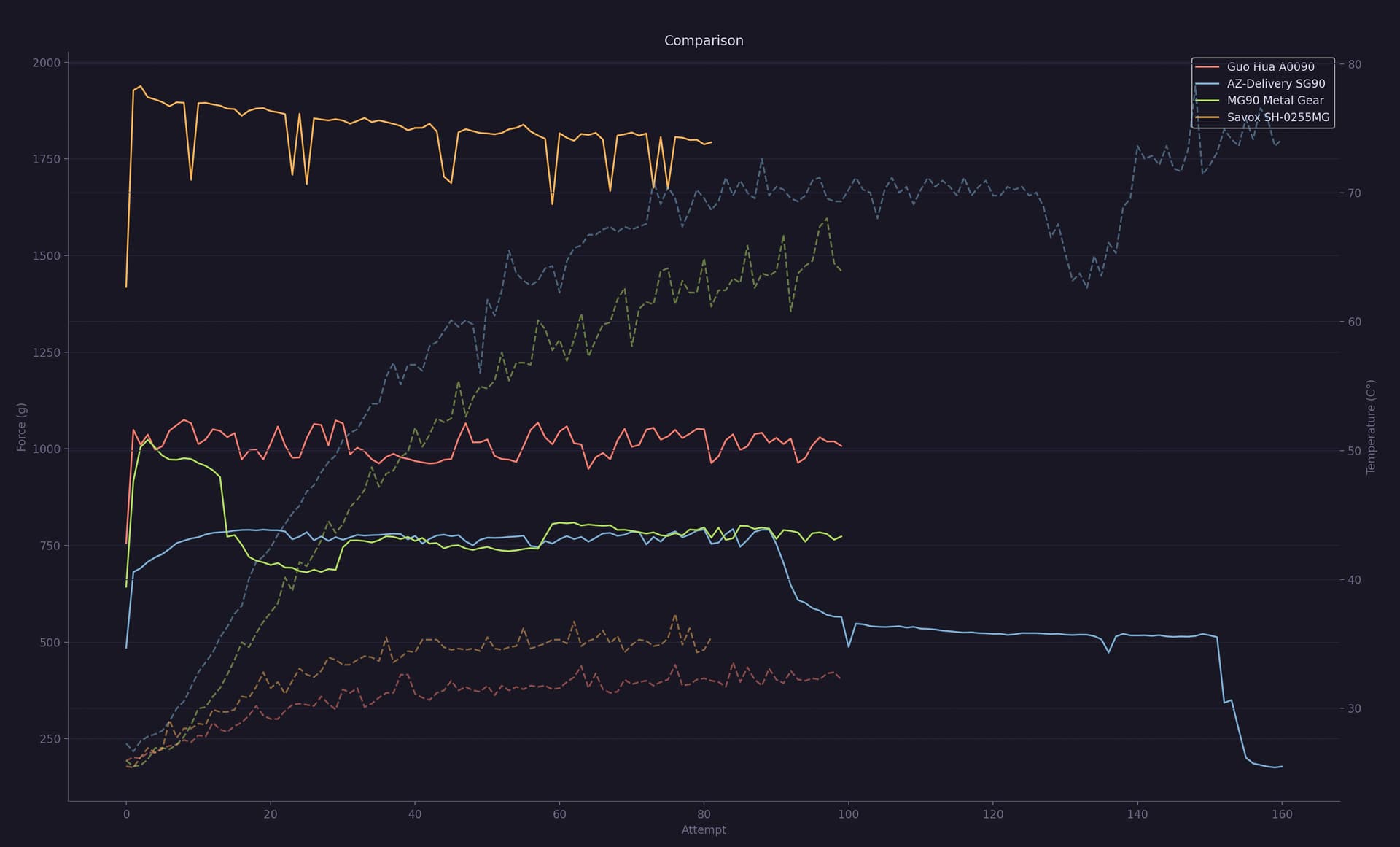
Auch in diesem Diagram sticht der Savöx klar raus, bei der Kraft tront deutlich über den anderen während die Temperatur unten nur knapp über dem Guo Hua liegt und sich scheinbar bei ~35C° einpendelt.
1 „Gefällt mir“
Klasse aufbereitet. Ein super Vergleich. 23€ ist natürlich heftig, aber das sind ja auch „nur“ 10x austauschen des billigsten ![]()
Die unterschiedliche Achsenbeschriftung/Skala irritierte mich beim ersten Lesen.
Ja, der Savöx ist halt wirklich eine Investition, das Thema Servos ist abgesehen von Wall-E, wo ich schon ein paar von den billigen Servos durchgebrannt habe auch für das ERCF Projekt sehr relevant, in dem ich aktiv bin.
Dort haben wir auch das Problem, dass der Servo, oft ein MG90S, sehr fehleranfällig ist und wir sind auf der Suche nach Alternativen.
Der Savöx wäre Ideal, ist aber halt auch kostspielig.
Ich habe jetzt auch nochmal 4 andere Servos bestellt, die ich auch nochmal durchtesten werde:
- GDW DS041MG (GDW DS041MG - GDW Servo Manufacturer)
- DSPower DS-S006M (High Quality DS-S006M sg90 9g Rc Servo mg90s metal gear digital micro servo Manufacturer and Supplier | Desheng)
- JX Servo PDI-1109MG (PDI-1109MG 9g Metal Gear digital Core servo)
- Original TowerPro MG90S (https://www.towerpro.com.tw/product/mg90s-3/)
Hier ist auch nochmal eine kleine tabelarische Übersicht über die Median Kraft, Median Temperatur und Max Temperatur:
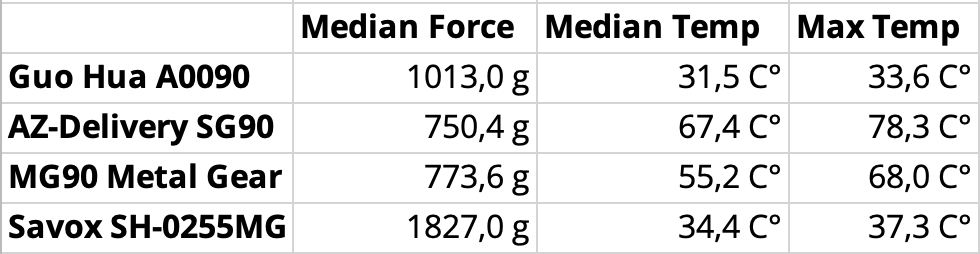
Gerade wegen der Temperatur fliegen hier der SG90 und MG90 (clone) halt schon mal raus wenn der Einsatzzweck den Servo von der Kraft auslastet.
1 „Gefällt mir“
So, hier geht es jetzt auch mal ein wenig weiter, habe gestern Abend angefangen die CAD Daten Grundsätzlich zu überarbeiten und habe die „Rückseite“ abgewandelt, so dass diese nach Hinten weg geklappt werden kann, damit man die 2 Bosch 12V Akkus leicht wechseln kann:
Statt integrierter 18650 Akkus hab ich beschlossen auf Standard 12V Bosch Akkus zu setzen, von denen ich eh ein paar habe und die leicht auszuwechseln/laden sind.

Hinten den beiden Akkus in der Rückseite eingebettet ist ein DC-DC Converter der aus den ~12V konstante 5V mit max. 10A bereit stellt.
Die Motoren selbst werden direkt mit den 12V ohne Umwandlung versorgt, die 5V brauche ich für die Servos und den SBC.
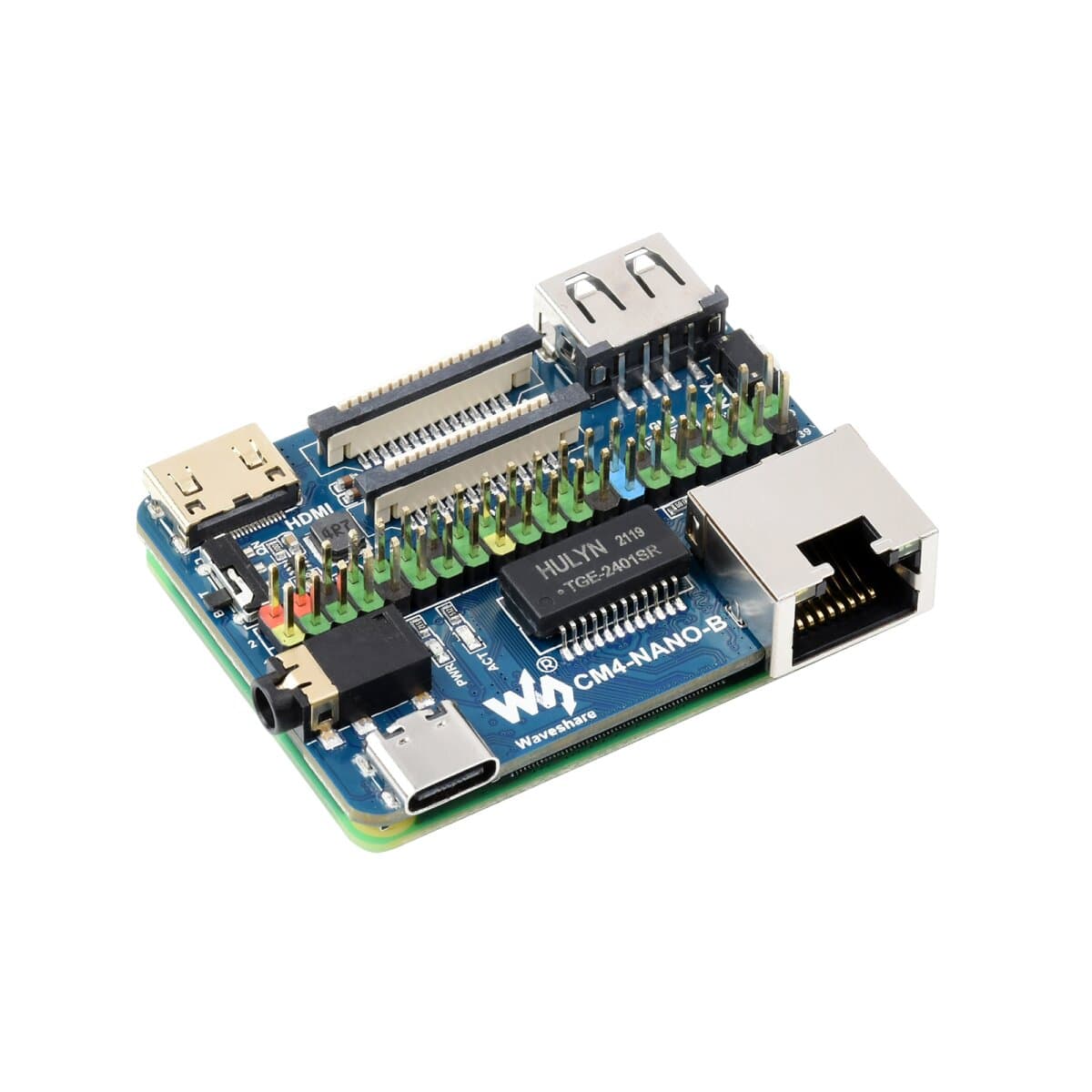
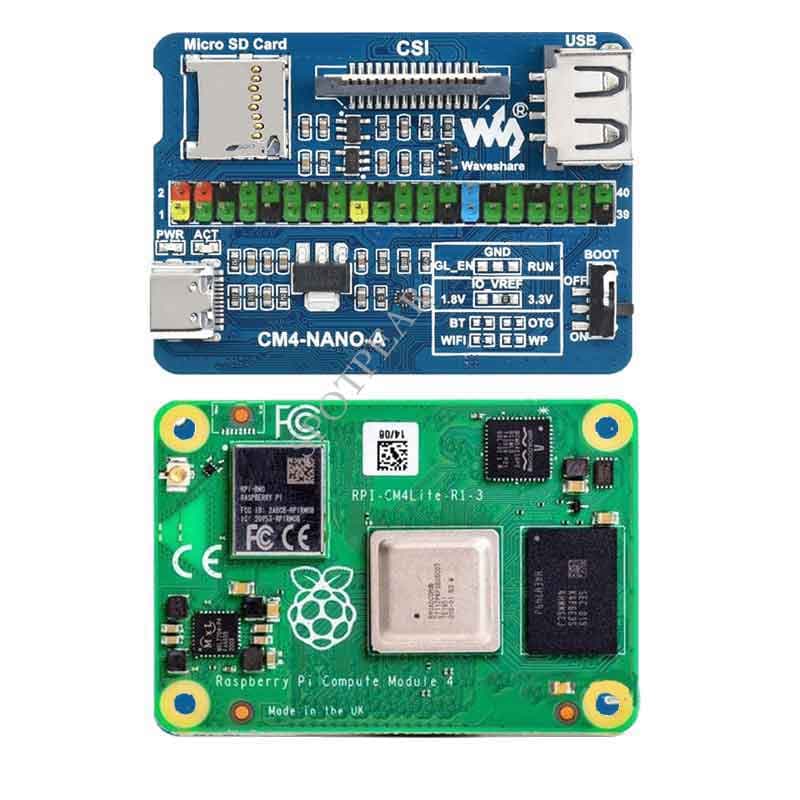
Ich habe beschlossen den RP2040/ESP32 Bluepad32 Ansatz zu verwerfen und stattdessen direkt einen Raspberry CM4 auf einem Waveshare Nano Base Board B einzubauen:
Als Software werde ich hier auf ROS - Robotic Operating System setzen, das ist ein international etabliertes System/Framework zum entwickeln von Robotern, was quasi alles vom kleinen Roboterarm bis zum selbst Fahrenden Auto betreiben kann.
Fällt gerade noch etwas schwer rein zu kommen, aber die grundsätzlichen Konzepte klingen sehr vielversprechend.
Grundsätzlich ähnelt es ein wenig MQTT, es gibts Nodes, Topics, Messages, etc. mit denen die einzelnen Komponenten, Services, etc. miteinander kommunizieren.
Darüber hinaus gibts auch diverse Tools zum visualiseren, tracken und simulieren
5 „Gefällt mir“